Raspberry Pi Pico
MicroPython - Basics
MicroPython - More Involved
MicroPython - Pico W
MicroPython - micro:bit
MicroPython - Projects
CircuitPython - Some Basics
CircuitPython - HID Adventures
CircuitPython - Experiments
Other Pages
![]()


Raspberry Pi Pico
Connecting Over UART
This is part of a much larger project that I have yet to complete. It does give proof of concept to the idea though and so I have included it here.
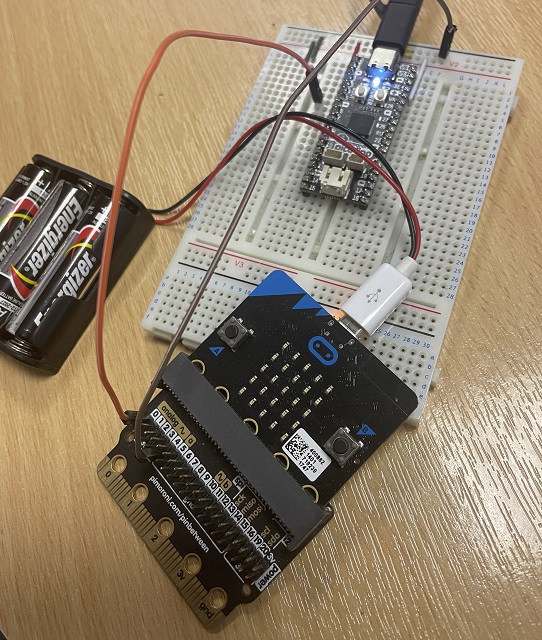
The micro:bit has the ability to communicate wirelessly with other micro:bits using bluetooth radio. I have accumulated a decent number of micro:bits over the years and have found them easy to use in various projects for remote controlling cars and other circuits. This project was a simple test of whether or not one of the micro:bits in a pair could be connected directly to the Pico and use UART to communicate some information.
Using the Pinbetween, I have connected pin0 of the micro:bit (tx) to GP5 of the Pico (rx). I am communicating in a single direction for this project. I have also connected GND on the micro:bit to GND on the Pico. I have powered the micro:bit independently although if you are only using the micro:bit by itself here, and not using a lot of juice from the 3V3 pin on the Pico, you could probably use that. In a robot vehicle circuit, you tend to power motors directly from batteries rather than from the regulated 3V3 supply anyway.
This was the code I put on the micro:bit for test purposes.
from microbit import *
uart.init(baudrate=9600, tx=pin0)
c = 65
while True:
uart.write(chr(c))
sleep(1000)
c += 1
if c > 90: c = 65
This was the receiving code that I put on the Pico,
from machine import Pin, UART
from time import sleep
uart = UART(1, baudrate=9600, rx=Pin(5))
while True:
if uart.any():
d = uart.read()
d = d.decode("utf-8")
print(d)
sleep(0.1)
Future Plans
This worked quite nicely. This opens up the possibility of setting up projects that use a combination of micro:bits and Picos to take advantage of the built-in bluetooth radio. In this page, I used MicroPython. You could, of course, use MakeCode too if you preferred.